Ja, nu ik nog wat tijd kan maken probeer ik zeker wel door te werken.
Heb de afgelopen dagen wat tijd weten te vinden om de eerste module van het Dinamo systeem te voorzien. Een erg leuk karwei om even lekker met printjes en draadjes te werken. Ik heb ervoor gekozen om eerst alle Dinamo onderdelen en voedingsbronnen een plaatsje te geven voordat ik de rijdraden en servo's aan ga brengen. Dit omdat de indeling van de elektronica de kabelwegen voor grotendeels bepaald:
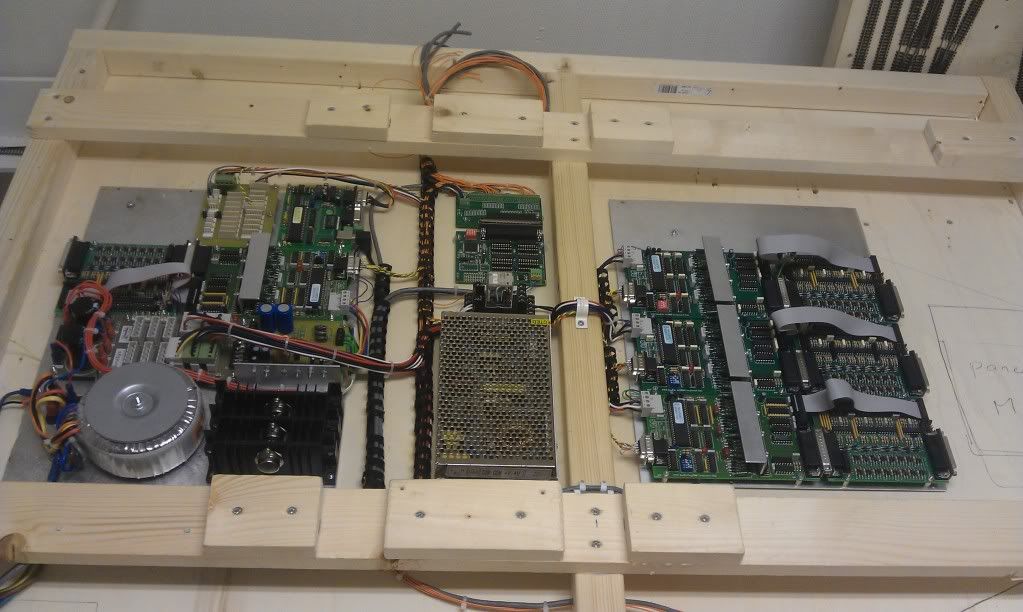
Even een uitleg van wat er te zien is:
Links onderin ziet u de ringkerntrafo met rechts ervan een zwart koellichaam. Deze horen bij de IPM welke zich naast het koellichaam bevindt. Het is dat kleine printje met die twee blauwe condensatoren erop. De IPM is de voedingsmodule voor het Dinamo systeem. Deze module trekt uit de trafo een 18V gelijkspanning en stabiliseert deze spanning. Via de interne elektronica zijn componenten geeft hij 4 spanningen:
- 12V
- 5V
- Rijspanning RS (instelbaar van 13-18V)
- Wissel Stuur Spanning WSS (instelbaar van 16-21V)
De WSS is oorspronkelijk bedoeld voor magneetartikelen. Maar omdat ik dat niet gebruik word deze gebruikt om de DRC te voeden met 16V
Aan de IPM ziet u een lange print met connectoren en twee zwarte condensatoren. Deze behoren ook bij de IPM en de print is de DPD van DinaSys bedoeld om snel en gemakkelijk de voedingsspanningen te verspreiden naar het printen.
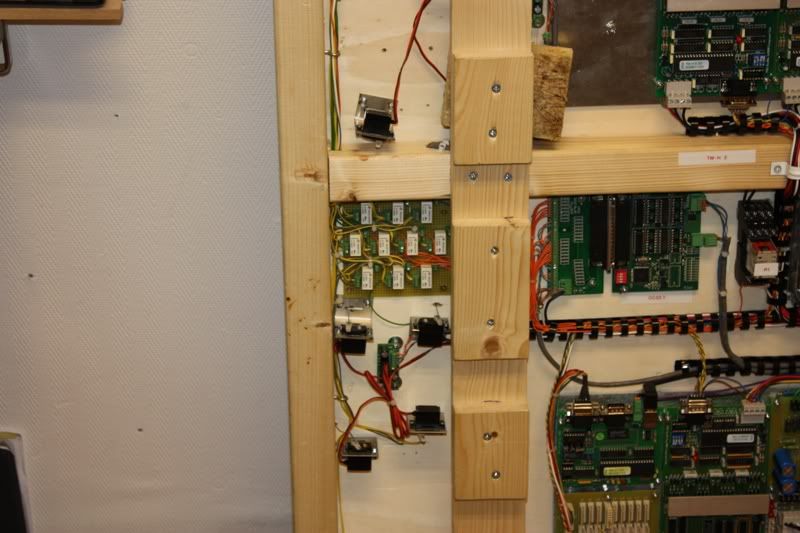
Boven de spanningsvoorziening ziet u de eerste blokkaart TM-H met een detectiekaart CD16. Deze print is de master module en de drie modules die u rechts naast de balk ziet zijn slave modules. In totaal heb ik vier blokkaarten TM-H met CD16 in de baan zitten.
Boven de TM-H ziet u rechts een klein groen printje aan de rechterzijde. Dat is het hart van Dinamo, de RM-U. Deze print voorziet de processen en bied de communicatie aan het systeem. Deze print wordt gekoppeld aan de PC en bestuurd dus het systeem.
Links van de RM-U ziet u een klein printje met wederom connectoren. Dit is de DDD van DinaSys en is bedoeld om de communicatie vanuit de RM-U te verspreiden. Er worden drie systemen aangeboden: TTL, RS232, RS485
TTL gebruikte het systeem voorheen toen het nog in de kast zat.
Nu het onder de baan is gebouwd worden de TM-H's aangestuurd via RS485. De RS232 word alleen gebruikt als back-up voor de OC32.
De OC32 ziet u aan de rechterzijde van de RM-U. De OC32 staat helemaal los van Dinamo en krijgt een eigen voeding en communicatie. Ik heb ervoor gekozen om alle OC32 modules via RS485 te koppelen aan de computer. Omdat je twee communicatiebussen kan gebruiken om de OC32 aan te sturen heb ik als back-up alle modules via RS232 gekoppeld aan de RM-U. Mocht de RS485 falen dan kan ik alle OC32 modules alsnog aansturen via de RM-U van Dinamo.
Onder de OC32 ziet u een klein relais welke de verlichting op de baan zal schakelen. Om de OC32's, UCCI, verlichting, servo's, en alle andere onderdelen van de miniatuurwereld van spanning te voorzien heb ik een voedingsbron geplaatst welke u rechts onderin ziet. Deze is instelbaar van 8-14V welke ik af heb geregeld op 9-10V. Het is niet perse nodig om 12V te gebruiken voor led's of relais, hoe minder hoe beter. Er is wel een punt dat relais niet meer werken maar die is meen ik 8,5V. Led's gaan gewoon wat minder fel branden, servo's hebben sowieso maar 5V nodig. Deze wordt via de SP4 print voorzien, die vlakt de spanning van 10V af naar 5V voor de servo's.
Onder het Dinamo systeem ziet u een metalen plaat. Deze metalen plaat moet zorg dragen aan een goede potentiaal vereffening. Door zorgt te dragen dat de aardaansluiting (COM ofwel min) goed en sterk is heb je minder last van storingen door magnetische velden, piekstromen enzovoort. Om dit te waarborgen heb ik op de metalen plaat een montageschroef zitten waarop ik het volgende heb aangesloten:
- aarde van de 230V aansluiting in de muur (Wandcontactdoos)
- COM van Dinamo
- COM van de externe voedingsbron
- de metalen plaat van de drie blokmodules rechts
Een erg leuk klusje was het omdat ik lekker creatief kon wezen met draden en dat is toch wel mijn ding

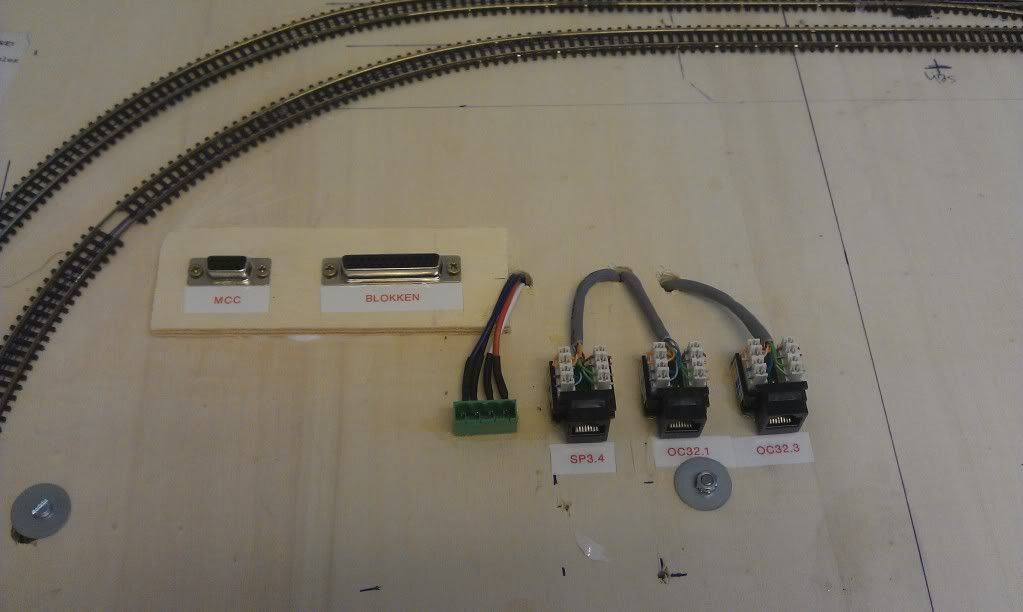
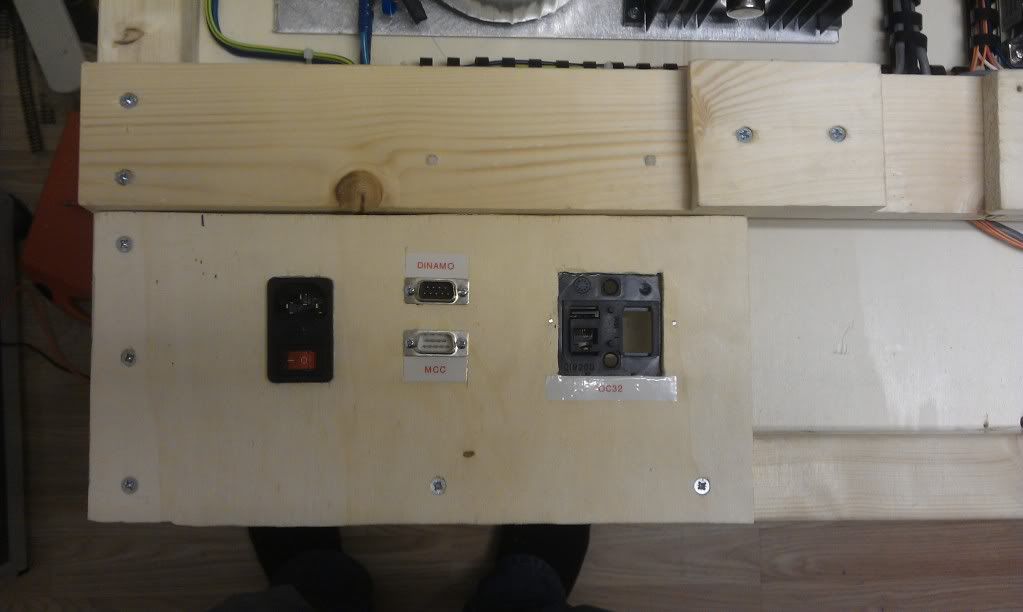
De volgende stap is de twee connector bords plaatsen. Links onderin komt de PC bord welke de verbinding gaat voorzien met de PC. Hierop komt een contactdoos voor de voeding met zekering en schakelaar, een connector voor de USB verbinding met de RM-U (Dinamo), een connector voor de USB verbinding met de UCCI (MCC) en een UTP aansluiting voor de verbinding met OC32.
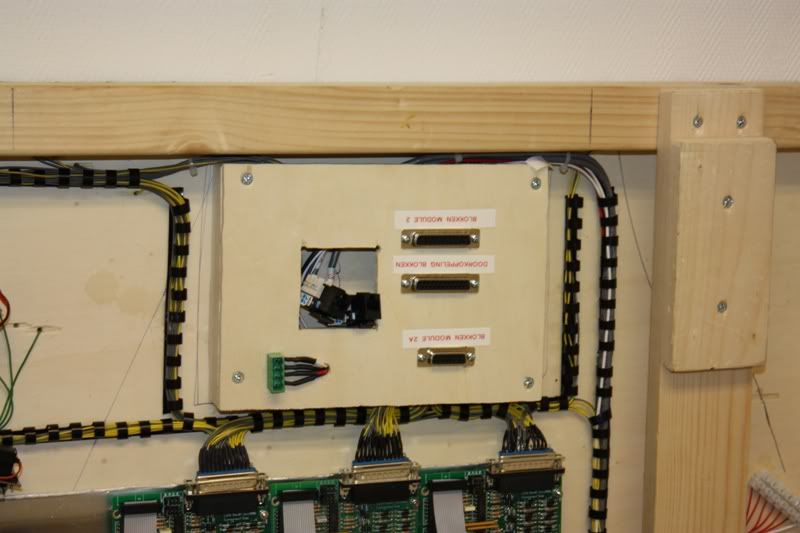
Onder dit bord komen de verbindingen naar scenery module 1a. Aan de rechterzijde komt een connectorbord met de verbindingen naar module 2.
Daarna ga ik de rijdraden solderen en de servo's en relais monteren. En dan....... kunnen we eindelijk gaan rijden
Zin in
Toen de proef op de som genomen of de module nog makkelijk de trap af komt, is wel zwaar maar hij heeft de test met vlag en wimpel gehaald:

Heel verhaal maar dat mag dan ook wel.
Stay tuned
Groetjes
P.s.: Ik ben bezig om mijn nieuwe site online te gooien. Interessant is dat ik mijn chatsite heb gewijzigd en ik er een webcam in het toegevoegd. Zodat je tijdens het chatten als ik online ben mee kan kijken met de bouw van Marelburg
ik verwacht dat dit deel morgen zal werken en dan plaats ik wel een draadje !!!