Tjonge, al weer een half jaar voorbij, waarin er veel is gebeurd
Zo is heeft de baan op de overloop plaats gemaakt voor fitness apparatuur.
Het geronk van een V200 heeft nu plaats gemaakt voor een verhoogde hartslag en zware ademhaling.

Gelukkig kon ik de baan onderbrengen in de aangrenzende zolderkamer, maar daarvoor moest het baanontwerp wel op de schop.
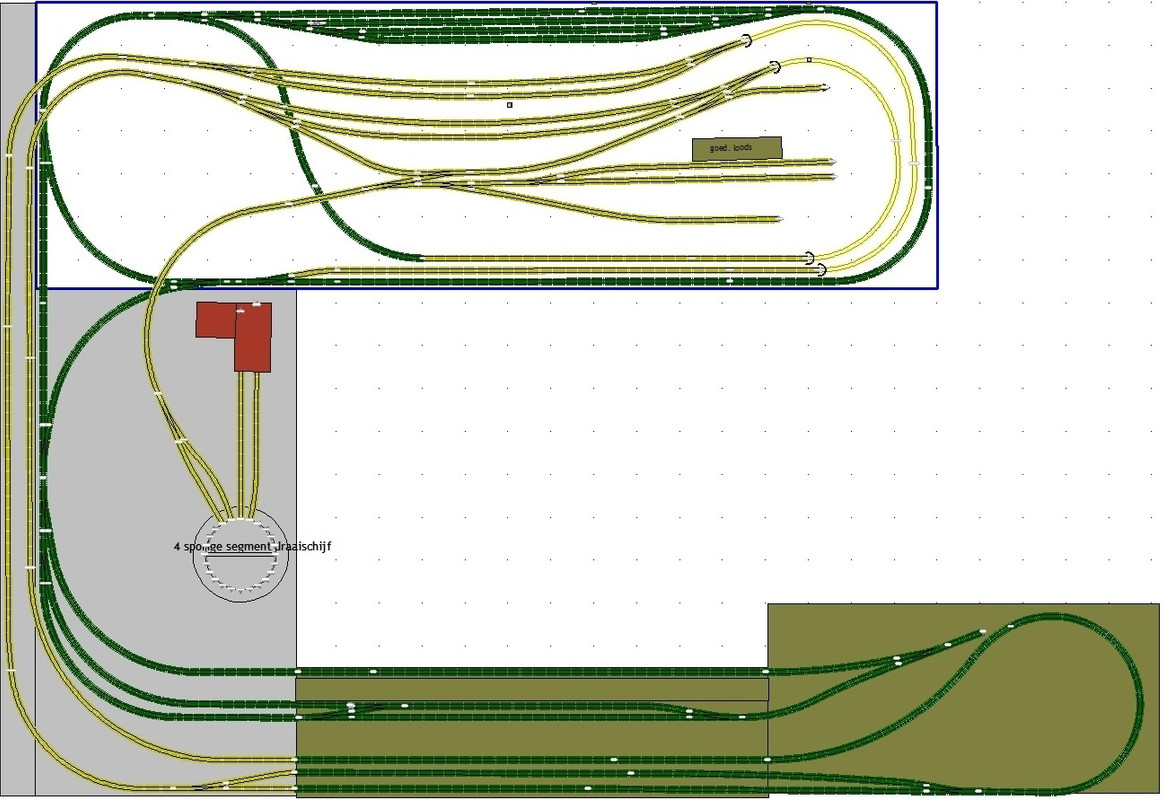
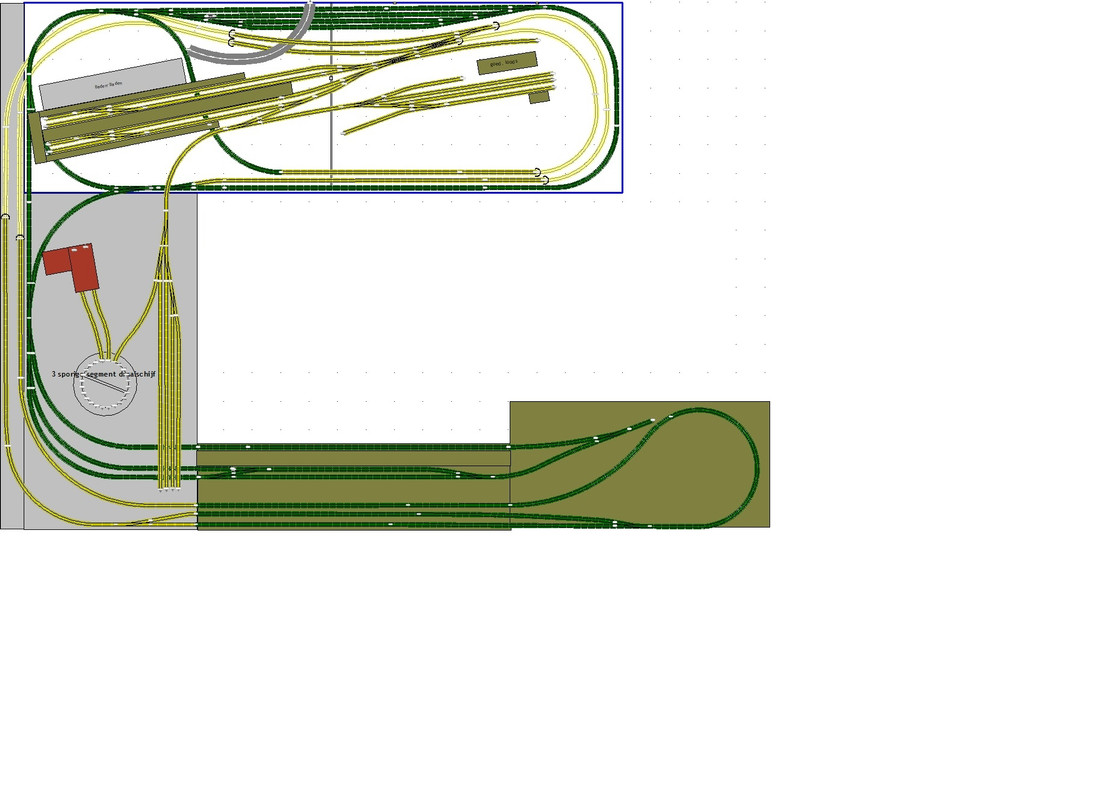
De bovenbaan op module 1 en 2 is veranderd in een kopstation, dat wordt bereikt via een aftakking van de hoofdbaan, die nog steeds de vorm van een hondenbot heeft. Het blijft tenslotte een "Knochenbahn¨.

Links is het ondergrondse station te zien dat via een overgangsmodule aan de hoofdbaan wordt gekoppeld.
De plaat van de bovenbaan is in twee ongelijke delen gesplitst om hem hanteerbaar te houden.
Nu was het de kunst om twee vlakke delen goed uitgelijnd aan elkaar te koppelen, want er is geen ruimte om langs de randen balkjes aan te brengen voor de benodigde stijfheid.
Ik heb dat opgelost door aan de randen de twee delen via scharnieren te koppelen en in het midden twee 1 x 1 cm dikke balkjes met stalen deuveltjes te verbinden:

Dit is het kopstation in aanbouw.

Het bepalen van de juiste rijweg met een analoge besturing van de wissels is best ingewikkeld, vooral omdat er twee hele en één half engels wissel inliggen. Daarom wordt het instellen van de rijwegen door het station geautomatiseerd.
Hier de techniek die daarvoor nodig is:
- een Raspberry Pi 2B met 7" beeldscherm;
- twee relaismodulen met in totaal 24 relais;
- 24 stuks MTB MP1 aandrijvingen;
- een trafo
- toetsenbord.
De besturing vindt plaats m.b.v. een stukje Python code.
Hier een filmpje van een test met het aansturen van twee aandrijving
Per aandrijving zijn twee relais nodig. Met een tussenpoze van 5 seconden wordt de schuifbeweging uitgevoerd.
Het is de bedoeling om door het ingeven van nummers van begin en einde van de rijweg op het scherm de tussenliggende wissels na elkaar in de juiste stand te leggen.